Introduction to MDP
Markov Decision Processes
Definition
Intuitively speaking, MDP is the extension of Markov chain. MDP adds the notion of control $a$, which means the transition from one state to another not only depends on the current state, but also depends on the control.
MDP is defined by a tuple $\langle \mathcal{S}, \mathcal{A}, T, \mathcal{R}, \gamma \rangle$, where
- $\mathcal{S}$ is the set of all states. We denote the state $s \in \mathcal{S}$.
- $\mathcal{A}$ is the set of all actions. We denote the action $a \in \mathcal{A}$.
- $T: \mathcal{S} \times \mathcal{A} \times \mathcal{S} \mapsto [0,1]$ is the transition kernel. With the Markov property1, it is the probability $p(s’ \vert s, a)$.
- $\mathcal{R}$ is the reward function. It can be defined as the state reward function $\mathcal{R}: \mathcal{S} \mapsto \mathbb{R}$ or the state-action reward function $\mathcal{R}: \mathcal{S} \times \mathcal{A} \mapsto \mathbb{R}$. The definition depends on the specific literature. It is simply a function not a random variable. So we use $r(s)$ or $r(s,a)$ to denote the reward function. It is clear that $r(s’) = \sum_a r(s,a) p(s’\vert s, a)$.
- $\gamma \in [0,1]$ is the discounted factor.
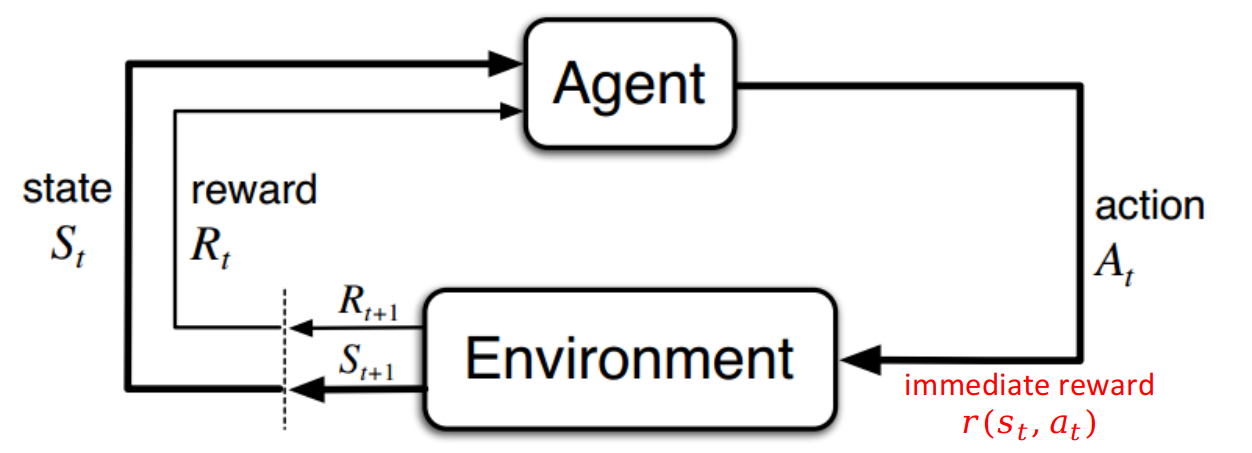
Note: We should be aware of the state reward and state-action reward. See the following figure. In MDP at time $t$, agent is in state $S_t$. When it chooses an action $A_t$, the agent can receive an immediate reward $r(s_t, a_t)$. It is more like the reward on the action. We can compare it with the control cost $u_k^T u_k$ in the optimal control. Some literature do not define this immediate reward.
After the agent chooses the action, the environment will respond to it and generate the new state $S_{t+1}$ and the reward $R_{t+1}$. Note that $R_{t+1}$ may not relate to the state and can be completely random. But to simplify the analysis, we assume that the generated reward $R_{t+1}$ is a function of $S_{t+1}$. This means that when the realization of $S_{t+1}$ is determined, the reward $R_{t+1}$ is also determined.
The above argument makes more sense when considering robotic applications. We can use MDP for high level planning. At time $t$, the robot is state $S_t = s$ and it chooses a action $A_t = a$, which gives an immediate action cost $c(s, a)$. After that, the mission status changes to $S_{t+1} = s’$. The robot will receive a reward $r(s’)$ based on the mission status, which can be either good or bad. Therefore, the utility of the robot is simply $u(s’, s, a) = r(s’) - c(s, a)$. It is very like the cost in optimal control: $x_{k+1}^T x_{k+1} + u_k^T u_k$. This shows that the state-reward function is not in the same time step as the state-action reward. This is why in Sutton’s book, the objective of MDP is to maximize $R_{t+1}+\cdots$ while in Filar’s book, the objective is to maximize $R_t + R_{t+1} + \cdots$.
Since MDP is a sequential decision making problem, we denote $S_t$ as the state at time $t$. So is $A_t$, $R_t$. Note that $S_t, A_t, R_t$ are actually random variables. $S_t = s$ and $A_t = a$ are the realizations. The expectation of $R_t$ can be computed by $p$ and $r$.
The transition kernel defines the dynamics of the MDP. It also indicates the environment model. For example, we can define $p(s’, r \vert s,a) = \Pr[S_{t+1} = s’, R_{t+1} = r \vert S_t = s, A_t = a]$, which means the environment is also MDP. See Chapter 3. We can also define state-transition probability $p(s’\vert s,a) = \Pr[S_{t+1} = s’ \vert S_t = s, A_t = a]$ which is simply $\sum_r p(s’,r \vert s,a)$. In this way, we assume each state corresponds to a unique immediate reward.
Note: The size of $\mathcal{S}$ usually equals the size of $\mathcal{R}$. The immediate reward does not necessarily corresponds to the current state unless we have a complete information of the environment. For example, at time $t$ we are in $S_t = s$, but the immediate reward does not have to be $R_t = r$. The environment may also do MDP, so there is a probability that the reward is $r$ when we reach state $s$. Usually people consider finite MDP model, which means that the size of $\mathcal{S}$ and $\mathcal{A}$ are finite.
Note: the policy $\pi(a\vert s)$ is fact stationary. It does not change with the time horizon, which mean we do not have $\pi_{t}(a\vert s), \pi_{t+1}(a\vert s)$.
We define the return $G_t = R_{t+1} + \gamma R_{t+2} + \cdots = \sum_{k=0}^\infty \gamma^{k} R_{t+k+1}$. We also define the state-value function $v_\pi(s) = \mathbb{E}_\pi [G_t \vert S_t = s]$. Note that different policy $\pi$ corresponds to different state-value functions. There is an optimal state-value function, which corresponds to the optimal policy $\pi^*$.
The objective of MDP is to find the optimal policy $\pi^\ast$ such that the expected return $\mathbb{E}[G_t \vert S_t=s]$ is maximized. The corresponding state-value function is denoted as $v^*_\pi(s)$.
We derive the fundamental property of state-value functions which is similar to DP.
\[v_\pi(s) = \mathbb{E}[G_t\vert S_t = s] = \mathbb{E}_\pi[R_{t+1} + \gamma G_{t+1}\vert S_t = s] = \mathbb{E}_\pi[R_{t+1} \vert S_t = s] + \gamma \mathbb{E}_\pi[G_{t+1} \vert S_t = s].\]The first term tells
\[\mathbb{E}_\pi[R_{t+1}\vert S_t = s] = \sum_{s'}(r_{s'} \sum_a p(s'\vert s, a)\pi(a\vert s)).\]The summation is over $s’$ because we assume the reward and state has one-to-one correspondence. We denote the reward as $r_{s’}$. The second term tells
\[\mathbb{E}_\pi[G_{t+1} \vert S_t = t] = \sum_{s'}(\sum_a p(s'\vert s,a) \pi(a \vert s) \mathbb{E}_\pi[G_{t+1}\vert S_{t+1}=s']) = \sum_{s'}(\sum_a p(s'\vert s,a) \pi(a \vert s) v_\pi(s')).\]Therefore, putting them together, we have
\[v_\pi(s) = \sum_{a} \pi(a\vert s) \sum_{s'} p(s'\vert s,a) \left[ r_{s'} + \gamma v_\pi(s') \right], \quad \forall s \in \mathcal{S}.\]Solution and algorithm
value iteration, policy iteration, LP: 15-780: Markov Decision Processes
-
Markov property (or Markov assumption): transitions only depend on current state and action, not past states/actions. ↩